Deployment
In final working prototype of the Road Crossing Assistant,
which can be used by blind people in real time, we have
deployed our single frame cnn model on Nvidia Jetson Nano B01.
We converted our pretrained TensorFlow model into a TensorRT
model to optimize the processing power and achieve low latency
with high throughput. The throughput obtained by TensorRT
model is 8 fps as compared to 3 fps by simple TensorFlow
model.
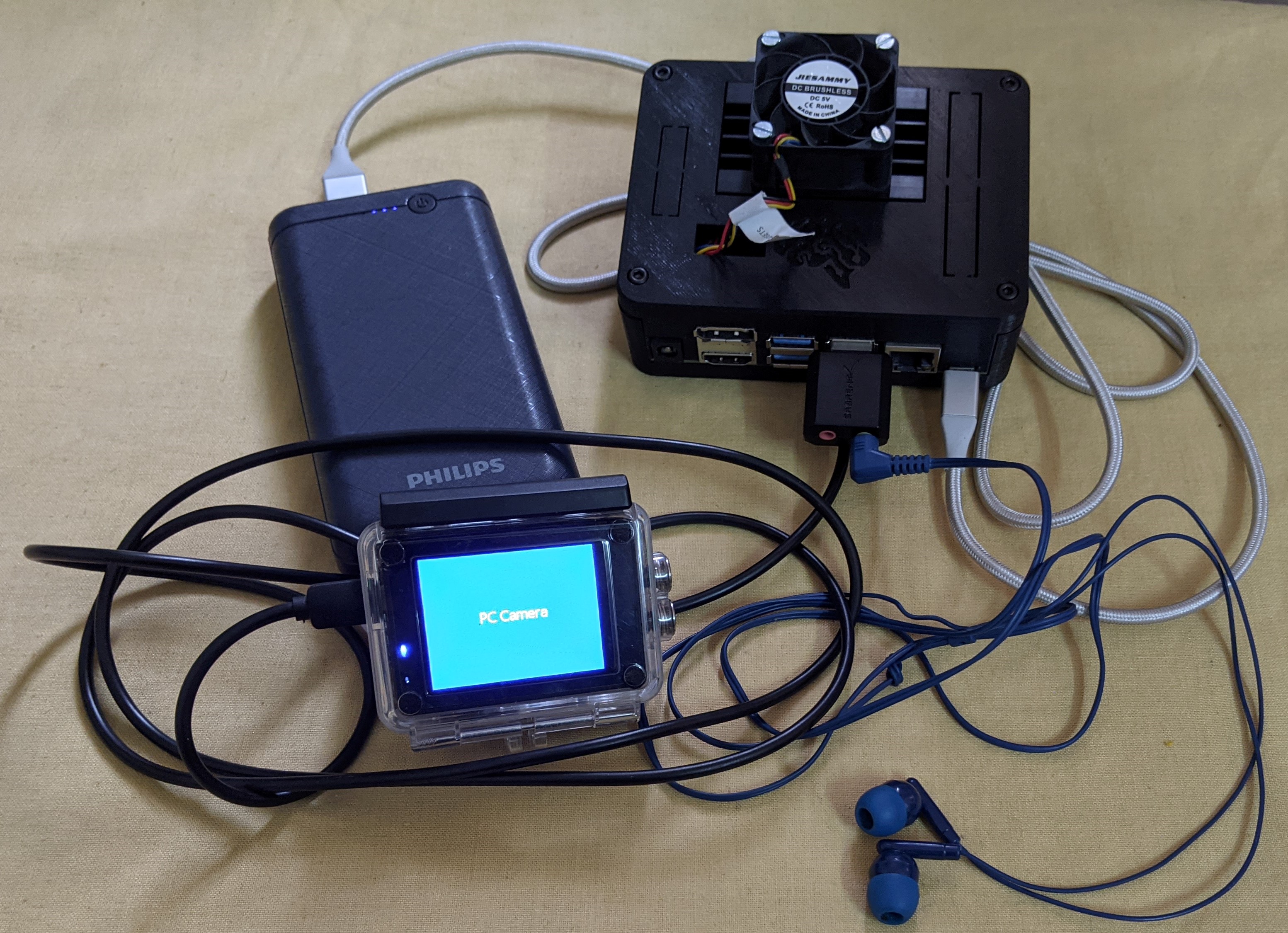

Nvidia Jetson Nano B01

SJCam

Cooling fan

Power bank

USB audio adapter for headphones

64 GB UHS-1 MicroSD Card
- For headless setup of the Jetson Nano, we additionaly required an ethernet cable.
- In final version of roadcross assistant, we have put Jetson Nano in a 3D printed case.
Hardware Components used
- For headless setup of the Jetson Nano, we additionaly required an ethernet cable.
- In final version of roadcross assistant, we have put Jetson Nano in a 3D printed case.
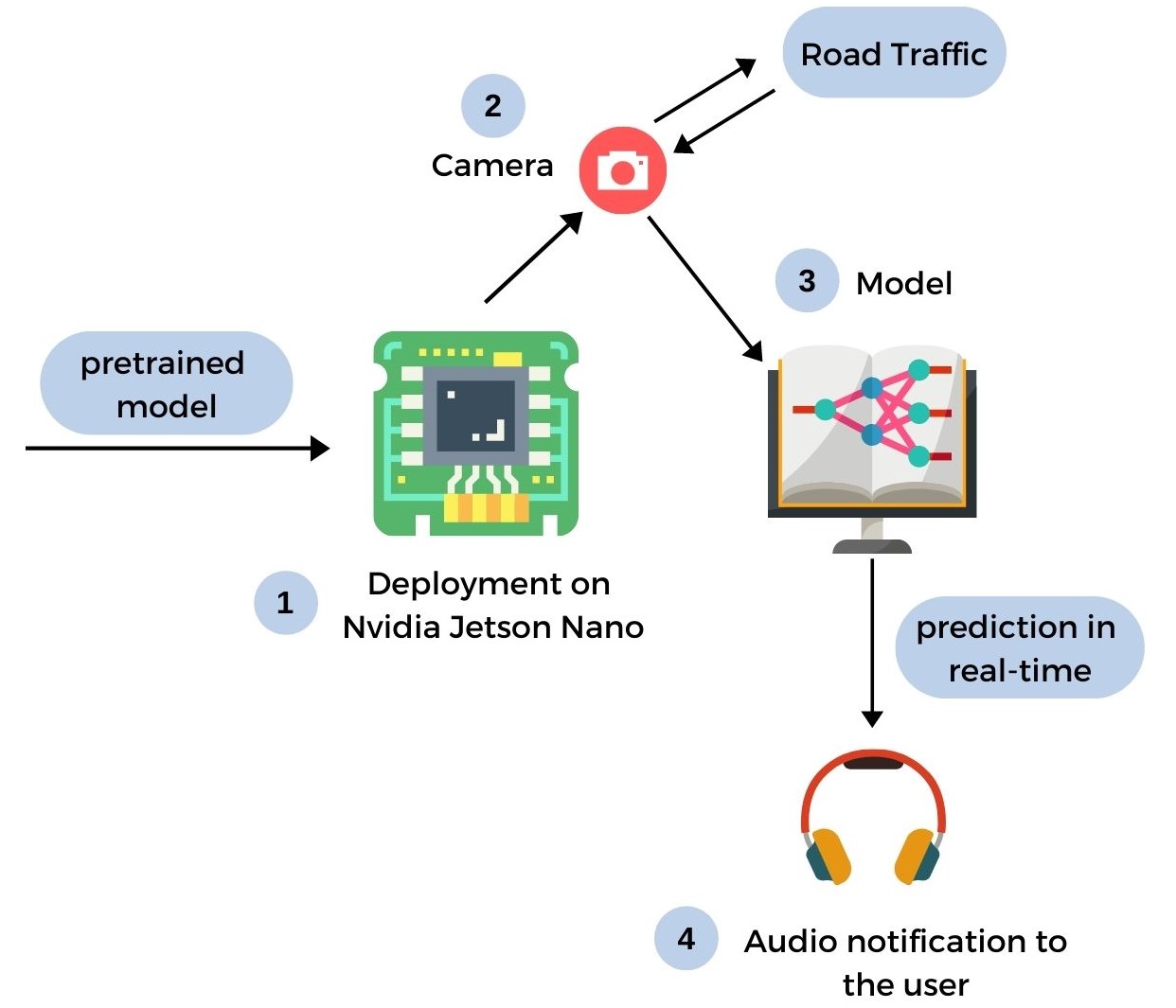
Deployment workflow
Jetson Nano will run the pre-trained TensorRT model on
real-time video stream (obtained from the camera module
attached to it) and predict whether it is safe to cross
the road seen in the video stream. It will also control
the audio output of headphones to communicate with the
user through simple audio commands.
Demonstration video